3-х координатный фрезерный
станок.
"это только начало а в начале тяжело"
Для чего нужен: изготовить алюминиевую
форму для формовки угле/органо/стеклопластиковых
лопастей.
Почему: заказывать такую форму дорого.
Во что обойдется: по комплектухе
уложится в 500-700$
Сколько делать: ... долго :-)
Дополнительно: При проектировании и
изготовлении приобретается бесценный опыт
того, что делать не надо :-) и навыки работы с
металлическими конструкциями, сравнимыми
по размеру с частями вертолета. Появляется
безграничная вера в свои силы :-)))
Состояние на сегодняшний день: сделана
механика одной координаты, готовится
основной блок управляющей электроники,
идет разборка с датчиками перемещения.
Краткое описание:
Основание из профильной трубы 50x25x2,
крепление на болтах M6, после отладки, перед
окончательной сборкой все будет проварено.
Направляющие - нержавеющая полированная
труба 40х2. К основанию они крепятся хомутами
глушителя классики. По направляющим
перемещается каретка, состоящая из
ползунов и скрепляющего их основания.
Ползун это два угола 50х50х5, на боковины
которых установлены подшипники. Углы
притянуты друг у другу пружинами. Один
ползун обхватывает свою направляющую с 4-х
сторон (8 подшипников), обеспечивая фиксацию
каретки в 2-х плоскостях. Второй ползун
имеет 4 (а вообще надо переделать на 2)
подшипника и фиксирует каретку от
проворота. Перемещение каретки
осуществляется посредством зубчатого
ремня, в данном случае взяты два ремня от 16-ти
клапанной 10-ки и шестерни ГРМ коленвала от
2108. Момент на ведущую шестерню поступает
через муфту и понижающий редуктора от
шагового двигателя. ШД имеет 200 шагов на
оборот. Редуктор взят от привода дворников
классики и доработан - от первоначального
осталась шестерня и корпус и часть червяка.
Сам червяк обточен и на подшипниках помещен
в стакан. Стакан закреплен с возможностью
качения в плоскости (ну не совсем, там
наклон есть) червячного колеса и
подпружинен. Этим обеспечивается плотный
контакт между червяком и шестерней. Без
нагрузки, при хорошей смазке, люфт на выходе
редуктора составил половину одного шага,
при том, что на один оборот этих шагов
получается 10200 (десять тысяч двести :-).
Минимальное перемещение каретки
составляет ~0.019мм. При нагрузке и
обратном ходе есть люфты, порядка 10 шагов,
которые буду пытаться устранить вводя
обратную связь по положению. В качестве
датчика перемещения предполагается
использовать оптическую мышку на 800dpi. Если
кто то знает в каких моделях мышей
используется сенсор A2030 или A2051
напишите, пожалуйста. Так же буду
признателен за инфу по сенсору A2020, который
стоит в Logitech MX300. Умные мысли и идеи по
теме приветствуются. Конструктивная
критика - тоже :-)
Фото :
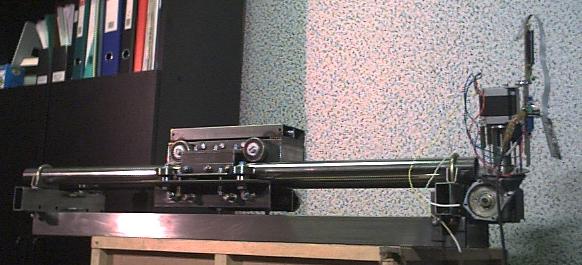
Общий вид
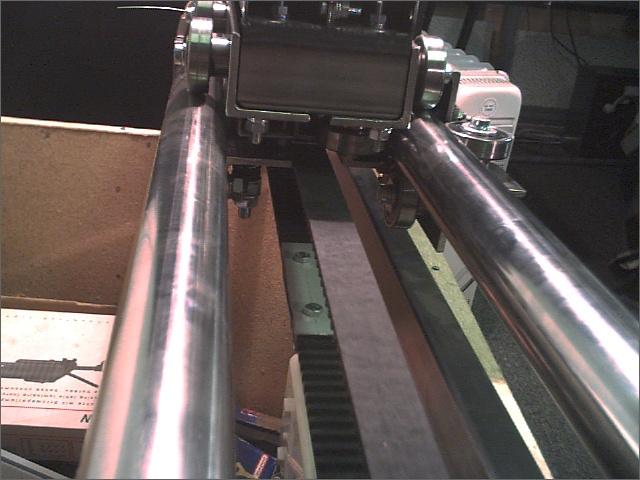
Каретка, общий вид
Каретка, вид спереди 1
Каретка, вид спереди 2
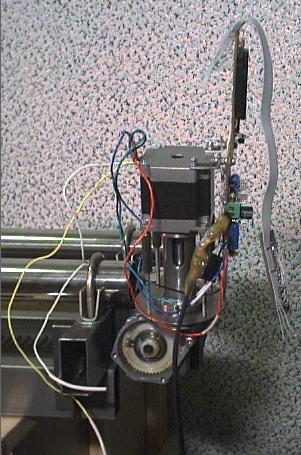
Редуктор с ШД
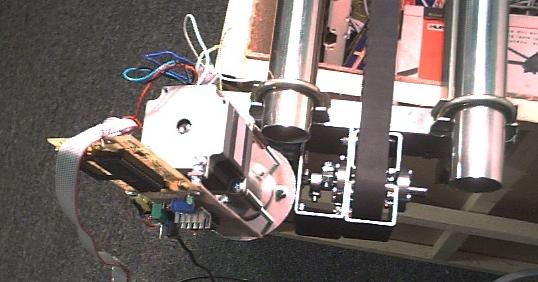
Редуктор с ШД,
передаточная муфта с ведущей шестерней (вид
сверху)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}